





Often, robots aim to replicate some form of natural motion or action. In controlled settings such as high-volume manufacturing or warehouse inventory, robots are often far better performing, with a higher quality of work and lower cost over time. However, in more dynamic situations, like artisanal manufacturing or disaster response, natural systems are more likely to outperform a robot.
The performance of controlled tasks — for example, much of what is seen in a warehouse — can be easily quantified: speed, force/torque, precision, and repeatability are traditional, functional mechanical metrics that robots have been outperforming human counterparts on for decades. How do we explain the failure to succeed in more dynamic scenarios? In partial answer to this question, I have developed a new point of view from which to observe robotic capabilities, one that might help quantify the ways that natural systems outperform artificial ones.
My model, which relates entropy to expressivity, gives a numerical perspective to compare the expressive capabilities of robots and natural beings. This topic is explored in my research lab through interdisciplinary collaboration with artists and somatic practice, as shown in Fig 1-2.

Fig 1-2 Left: Embodied practice in the RAD Lab led by Riley Watts (center); photo by Catie Cuan. Right: Artistic practice in the RAD Lab through a performance of “Time to Compile” at Brown University; photo by Keira Heu-Jwyn Chang.
In computing, a common way of modeling capacity uses the number of transistors that a device has. Over time, the number of transistors inside computer processors has increased and so has the computing power, a trend that is often referred to as Moore’s Law. This type of transistor count gives a static bottleneck for the computational capacity of computers, ignoring dynamic aspects of processor speed, for example. I noticed that a similar count of static external configurations of robots could also reveal trends in robotic capacity. Linking computation and mechanization in a robot to internal and external state changes, respectively, in a natural organism allowed me to compare how expressive robots are relative to natural organisms (shown in Fig 3-4).
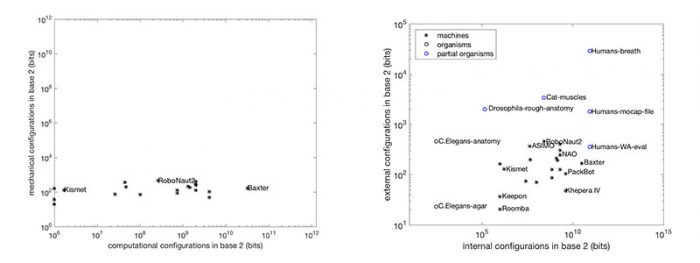
Fig 3-4 Left: A comparison of the change in internal versus external complexity of robots over the past 15 years. Right: Comparison of the same group of robots to natural systems. A. LaViers. “Counts of Mechanical, External Configurations Compared to Computational, Internal Configurations in Natural and Artificial Systems.” PLOS ONE. 14(5): e0215671. 2019.
This work uses two models of a microscopic worm (C. Elegans) and several partial organism analyses as well as analysis of a variety of well-known modern robots. A graph of my findings shows that by using my proposed expressivity metric, the performance of 20 robots developed over the last 15 years lies roughly between two models of the C. Elegans worm. That is, an apt natural correlate for the expressivity of extant robotic systems may be a tiny worm. The comparisons are not perfect, but they provide a simplification of a complex problem in order to understand the bigger picture — i.e. how much progress can be made in the realm of robotics in recreating human activity.
In the field of robotics, the advantages of nature can get undervalued. My work contextualizes the progress made by roboticists over the years. Robots have become far more advanced, but when it comes to the high-fidelity imitation of nature, there is still much to do. The groundbreaking aspect of this new research is that this particular counting model has not been used before in robotics, but the results support empirical observations that can be made about robots: they are not as expressive as animals. This suggests that entropic measures might be important in improving mechanical systems.
The trends revealed in my new research are a natural outgrowth of bodily investigation collocated with the technical development of novel robotic systems. The interdisciplinary nature of my lab offers the robotics community a new perspective, exemplified in this new paper, that can help us improve failure and robustness of machines in dynamic environments, including those where robots need to be embedded in social, interactive settings, by understanding the expressive, articulate capacity of the human body.
Related Posts
 Improving Tools For Quality Improvement: Crossings, Runs, And Crossrun
Improving Tools For Quality Improvement: Crossings, Runs, And Crossrun Coherent Poly Propagation Materials With 3-Dimensional Photonic Control Over Visible Light
Coherent Poly Propagation Materials With 3-Dimensional Photonic Control Over Visible Light Reconstructing Commuter Networks Using Machine Learning And Urban Indicators
Reconstructing Commuter Networks Using Machine Learning And Urban Indicators Surprising Internal Structure Of Whole Wheat-Green Gram Functional Bread
Surprising Internal Structure Of Whole Wheat-Green Gram Functional Bread Tailoring Tomatoes To Match Individual Consumer Needs
Tailoring Tomatoes To Match Individual Consumer Needs Eavesdropping On “Classroom Talk” In Undergraduate STEM Classrooms
Eavesdropping On “Classroom Talk” In Undergraduate STEM Classrooms