




The equation for torque can be represented with the following equation: τ = F * rsin(θ).
T is the torque vector while F is the given force, r is the moment arm’s length, and θ is the angle found between the moment arm and force vector. That is the basic equation for calculating torque, but to make sense of this equation let’s go over torque in more detail, to understand what it represents and how it is measured.
What Is Torque?
Torque is the force that moves an object in an angular fashion or the force that causes a given object to build up angular acceleration. To put that another way, torque is the force that moves the object about an axis, is measured. It is analogous to how force is a measure of the acceleration of an object in linear kinematics, but it measures angular acceleration instead. Torques are measured in vectors, and the direction of the vector is dependent upon the direction through the axis that the force is proliferating.

Photo: susannp4 via Pixabay, CC0
One of the easiest ways to illustrate an example of torque is by examining the motion of a door as you open it. When you go to open a door, you put your hand on the knob and push/pull it open, so this means you are exerting force on the door at a point in space furthest from the hinge. If you want to try and open a door by pushing on the side of the door closest to the hinge, you would need much more force to do it. So while the door would still move the same amount, one act would require much less force than the other act. The force that is used to generate the motion of opening the door is the torque.
When measuring torque, it can be either dynamic or static in nature. Static torque is torque that does not result in acceleration across an axis, a force which fails to produce angular acceleration. If the door you were trying to open it was closed and you were pushing on it, this would be static torque. While the force would be being applied to the door, there is no rotation of the doors hinges, and thus the torque is static. Meanwhile, an example of dynamic torque is starting your car and driving it. When you accelerate, this is an example of dynamic torque since angular acceleration is produced, and the wheels of your car move it from one position to another.
For the purposes of clarification, let’s note here that “torque” is not the only way to describe force producing angular acceleration. Engineers may occasionally use the term “momentum of force”, or simply “momentum” as a substitution for torque. The “moment arm” is the radius at which the supplied force acts upon, from the point of rotation to the point that the force is applied.
How Torque Is Calculated
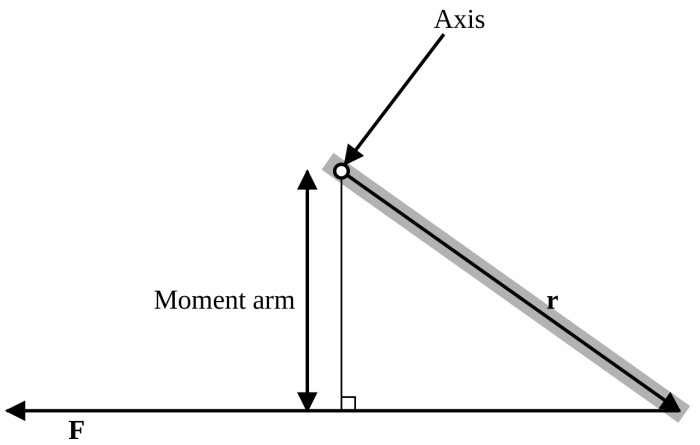
Photo: By Krishnavedala – Own work, CC0, https://commons.wikimedia.org/w/index.php?curid=20311913
Now that we’ve defined torque, understanding the equation for torque calculation is a little easier. Let’s take another look at the equation for torque:
τ = F * rsin(θ)
T represents the torque vector produced by a specific force, which is represented by F. The r variable represents the moment arm’s length, while Theta is that the angle found between the momentum arm and the force vector. A simple heuristic can be used to determine the direction of the torque vector, dubbed the “right-hand grip rule”. If you were to curl your right hand around the axis of rotation, closing your fingers around the vector which represents the force direction, then the torque vector will point in the direction of your thumb.
Torque is quantified using the Newton-meter, the measurements for torque used by the SI units system. Under the Imperial system, a foot-pound relationship is frequently used, although this is somewhat more difficult to interpret than the Newton-meter system because the term “pound” has a colloquial meaning as a unit of mass in addition to a unit of force. The pound here refers to the pound-force, or the force exerted on a 1 pound object at Earth’s gravity. Since 1.7 foot-pounds are approximately equivalent to one Newton meter, the measurements of magnitude are basically the same when this is accounted for.
Some additional considerations must be made when measuring the static torque in a stationary, nonrotating environment. This can be achieved by taking the length of the momentum arm and finding the torque directly, making it much easier than measuring torque in a rotating system. To measure torque in a rotating system, there are various methods, but a common system of measurement is to quantify the strain of the metal within the driveshaft, which is responsible for the transmission of the torque.
How Torque Impacts Rotational Kinematics
As mentioned earlier, torque can be considered equivalent to force in linear kinematics. Newton’s second law of motion and linear kinematics is represented by the equation F = ma (Force = mass x acceleration).
In rotational kinematics, there is an equivalent equation: r = Ia.
The “a” variable here represents angular acceleration while the rotational inertia of the system is represented by the variable “I”. Rotational inertia is dependent upon how the system’s mass is distributed, and as the value of I increases it becomes more difficult for an object to gain angular acceleration.
Understanding Rotational Equilibrium
If rotational equilibrium can be considered equivalent to the force equation in linear kinematics, it then follows that of an object which is stationary and not rotating, will remain in the state unless an external torque is applied to it. It also follows that only an external torque can shift the rotation of an object which is rotating at a constant angular velocity. Rotational equilibrium is a useful concept when trying to determine how multiple different torques influence a rotating object. In order to figure out the rotation of an object impacted by multiple torques, the net torque must be calculated. The object will be in rotational equilibrium if the net torque is zero, and the object is unable to accelerate.
Clarifying Torque, Power, And Energy
People often confused by the relationship between energy, power, and torque. For instance, the term “turning power” is often applied it to describe an engine’s torque, but although energy and torque can be quantified using the same basic units, they do not describe the same phenomenon. While power can be applied to nonrotating systems, torque is only applicable in a rotating system. It is possible to calculate power from a torque value if the system’s rotational speed has been determined. In actuality, horsepower is usually determined by calculating rotational speed and torque, not measured directly.
To make this more explicit, let’s take a look at the equations for Power:
P = (Force x Distance)/Time = (F x 2πr)/t = 2 ππw ( revolutions per second)
A vehicle’s max torque is frequently cited as an important statistic when providing vehicle specifications, along with the vehicle’s derived horsepower. Max torque will impact the acceleration of a vehicle, as well as its load-pulling ability. The maximum speed of the vehicle, rather than acceleration, is more influenced by horsepower than torque relative to the vehicle’s weight.
A vehicle’s overall motion is determined by more factors than just maximum horsepower and torque, so while knowing the maximum horsepower and torque of the vehicle will make obtaining certain specifications and calculations easier, many more variables need to be gathered when determining a vehicle’s total maneuverability. In reality, both horsepower and torque can vary as a function of the rotational speed, and different motors can have different relationships between torque and rotational velocity, frequently nonlinear relationships.
Altering Torque Levels
Photo: TheDigitalArtist via Pixabay, CC0
Different applications utilizing angular momentum often needed different levels of the torque, therefore torque levels must be increased or decreased according to the demands of the project. A lever’s length is what decreases or increases the force on an object, with relation to the distance that the lever is pushed along. If you been noticing the similarities between torque and force, you may be able to guess that the torque produced by a motor can be altered with a similar object, something analogous to the lever.
The use of gearing can decrease or increase the torque a motor produces, increasing torque as rotational speed decreases. Two gears mashing together essentially act like two levers pushing up against each other. One of the most visible examples of gears affecting the torque of an object is the gears of a bicycle, enabling the bicycle to achieve a useful speed without extreme effort on the part of the rider.
Related Posts
 Be Careful When Speaking About Lead Pollution: The Good, The Bad, And The Ugly!
Be Careful When Speaking About Lead Pollution: The Good, The Bad, And The Ugly! Temperature Has A Significant Influence On The Production Of SMP-Based Dissolved Organic Nitrogen (DON) During Biological Processes
Temperature Has A Significant Influence On The Production Of SMP-Based Dissolved Organic Nitrogen (DON) During Biological Processes Does The Arrow Of Time Apply To Quantum Systems?
Does The Arrow Of Time Apply To Quantum Systems? Labeled Periodic Table
Labeled Periodic Table A “Twist” In Wavefunction With Ultrafast Vortex Electron Beams
A “Twist” In Wavefunction With Ultrafast Vortex Electron Beams Chemical And Biological Characterization Spot The Faith Of Nanoparticles
Chemical And Biological Characterization Spot The Faith Of Nanoparticles