





The squeaking sound that basketball players produce as their shoes slide over the floor is a consequence of stick-slip motion: as the basketball shoe successively sticks and slips at a high frequency and over a short distance, the interface periodically compresses air, thereby producing the well-known squeaky sound. There are many other ways in which similar sounds can be created in a similar fashion: when you slide your hands over a balloon, when a car makes a sharp turn on the clean floor of a garage, and even when you play the violin.
In all cases, the contacting surfaces undergo a jerking type of motion by quickly alternating between sticking and slipping. Stick-slip motion can also have more dramatic consequences; earthquakes are known to result from the stick-slip motion of the earth’s crust, while stick-slip motion has been hypothesized to lead to damage in our joints.
Why do interfaces display stick-slip motion? A (thought) experiment that can illustrate the origin of the effect is conducted as follows: place a heavy book on the table and pull on that book using a compliant rubber band. The book will first remain in place as the rubber band is stretched and the pull force is increased. Once the pull force exceeds a critical value, the book will shoot forward and come to a stop: it will stick, slip and stick again. The reason for the sudden acceleration is that once the book moves the slightest bit, the friction force that resists the sliding decreases, while the rubber band still exerts the same large pull force. In other words, the resistance to sliding suddenly lowers once the sliding starts: sliding friction is lower than static friction. This is true for virtually all interfaces: basketball shoe vs. floor, car tire vs. road, bow vs. string, and so on. What do all these interfaces have in common that causes this universal difference between static and dynamic friction?

Image courtesy Bart Weber.
Surface roughness is thought to play a crucial role: at microscopic-length scales, surfaces are typically not smooth but rough, like a mountain landscape. A consequence of this surface roughness is that when you press two objects into contact, they will only touch at a few locations where their highest roughness peaks happen to come into contact (see figure). When the surfaces are translated with respect to each other, or sliding, the precise locations at which the surfaces touch change.
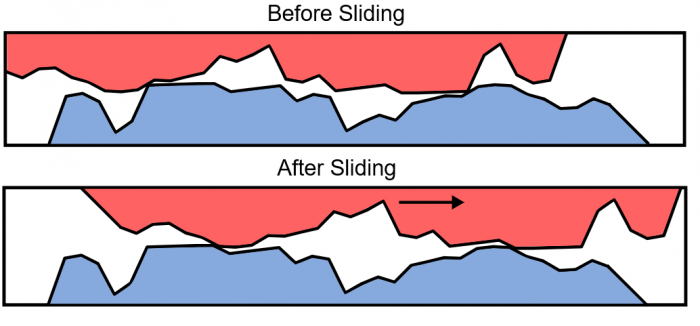
Figure courtesy Bart Weber.
While stationary, the contact force is carried by a relatively small number of contact points, leading to a large local pressure within the contact points, even when the applied contact force is not that large. The pressure exerted onto the microscopic roughness peaks can, in fact, be so large that – at a stationary interface – the peaks are gradually flattened in time. The further the roughness peaks become flattened, the larger the overall area over which the surfaces touch – and with that – the larger the friction force that will resist sliding motion at the interface. However, once sliding starts and the two surfaces move with respect to each other, they will not necessarily touch with the aged roughness peaks anymore and the growth of the contacts – and with that, the friction – is reversed.
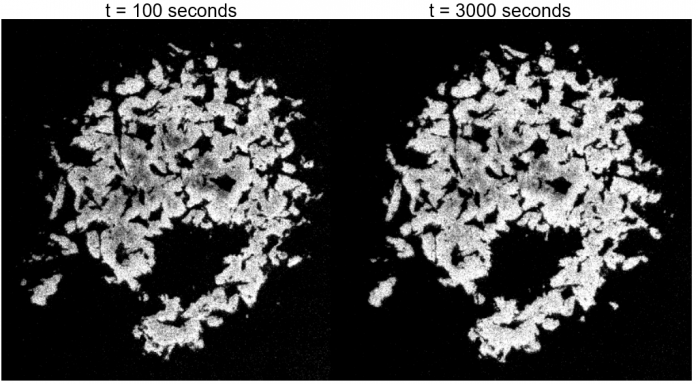
The contact between a plastic ball and a glass plate, seen through the glass plate. At those locations where the roughness peaks on the ball touch the plate contact sensitive molecules light up. In time, the contacts gradually grow. Figure courtesy Bart Weber.
To experimentally test this explanation for the difference between static and sliding friction, researchers from the University of Amsterdam performed an innovative experiment in which they visualized the interface between a plastic ball and a glass plate during the stick-slip transition. On the glass plate, the researchers chemically attached a layer of fluorescent molecules that essentially light up only when they are pressed upon by the roughness peaks on the plastic ball. This enables visualization of the contacts between the ball and the plate at the molecular scale through the transparent plate.
The experiment indeed revealed that the contacts gradually grow over time when a contact force is applied and the interface is held stationary. This growth in the number, or total area, of the contacts was also accompanied by an increasing static friction force: the longer the ball was pressed into contact before forcing it to slide, the higher the static friction force required to start the sliding. However, the rate at which the friction force grew with waiting time was faster than the rate at which new contacts were created. Furthermore, at the onset of sliding motion, the friction force dropped while the total area over which the ball and the plate were in contact remained unchanged. Both observations signal that there must be a process occurring within the microscopic contacts that leads to the weakening of those contacts at the onset of slip.
By analyzing the images of the ball-on-plate contact in more detail, the researchers discovered that the intensity with which the special probe molecules at the interface were emitting light precisely followed the evolution of the friction force during the stick-slip transition: initially, both intensity and friction force were high, at their static value, while subsequently both the friction and the intensity decreased when the ball started to slide. The conclusion is that at the moment the ball starts to move, the contact points melt, as it were, making them slide more easily and lowering the friction.
The experiment thus provides an alternative explanation for the stick-slip transition, a phenomenon that we hear on a daily basis and that can have destructive consequences at wildly varying interfaces, from earthquakes to machinery, brakes, and (human) joints.
These findings are described in the article entitled Frictional weakening of slip interfaces, recently published in the journal Science Advances.
Related Posts
 Be Careful When Speaking About Lead Pollution: The Good, The Bad, And The Ugly!
Be Careful When Speaking About Lead Pollution: The Good, The Bad, And The Ugly! Temperature Has A Significant Influence On The Production Of SMP-Based Dissolved Organic Nitrogen (DON) During Biological Processes
Temperature Has A Significant Influence On The Production Of SMP-Based Dissolved Organic Nitrogen (DON) During Biological Processes Does The Arrow Of Time Apply To Quantum Systems?
Does The Arrow Of Time Apply To Quantum Systems? Labeled Periodic Table
Labeled Periodic Table A “Twist” In Wavefunction With Ultrafast Vortex Electron Beams
A “Twist” In Wavefunction With Ultrafast Vortex Electron Beams Chemical And Biological Characterization Spot The Faith Of Nanoparticles
Chemical And Biological Characterization Spot The Faith Of Nanoparticles