





Image segmentation is a fundamental and challenging task in many subjects such as image processing and computer vision. Even though image segmentation seems obvious to a human observer, the problem is still very difficult to solve by a computer. Lots of work focus on segmenting natural colour images; however, when the given images are corrupted by different types of degradations – like noise, information loss and/or blur – the segmentation problem can be more challenging.
As to degraded colour images segmentation, can we still do a comparable segmentation work compared to the state-of-the-art achievements which are focusing on non-degraded ones? If so, can we keep the proposed method as simple as possible, at least not involving more computational overhead? With these basic concerns and our understanding of image segmentation and different colour spaces, we bring our solution, a method called SLaT – Smoothing, Lifting, and Thresholding.
The key point of the method SLaT is the lifting step, which is manipulating the synergy between different colour spaces e.g. RGB, HSI, CB, Lab, etc. This synergy will provide us rich information for the subsequent segmentation, as well as ensuring that even if the first colour space has highly correlated channels, we can still have enough information to obtain good segmentation results. The SLaT method can be described as the following three stages.
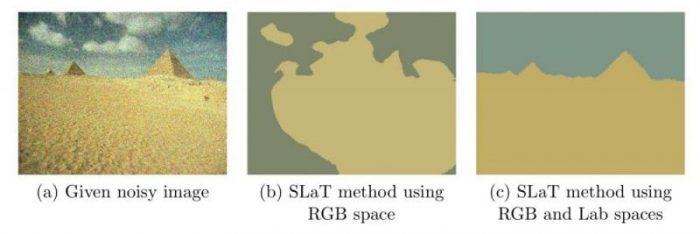
Figure 1: Segmentation results of the proposed SLaT method. (a) Noisy image; (b) Result without the synergy between colour spaces at Stage two; (c) Result with the synergy between colour spaces. The original test image can be found at jects/CS/vision/bsds/. Source: https://www2.eecs.berkeley.edu/Research/Projects/CS/vision/bsds/
– Stage one. Let the given degraded image be in space V1. A convex variational model is first applied in parallel to each channel of V1. This then yields a unique restored smooth image.
– Stage two. The second stage, which consists of colour dimension lifting, is the synergy between different colour spaces. Firstly, the smooth colour image obtained at Stage one is transformed to a secondary colour space V2 that provides us with complementary information; then these images are combined as a new vector-valued image composed of all the channels from colour spaces V1 and V2.
– Stage three. A multichannel thresholding is finally applied to the combined V1-V2 image to obtain a segmented image with K phases. Here K is a preset number of phases. Different values of K will lead to segmentation results with different phases. Note, however, that tuning K does not influence the previous two stages but the last Stage three which can be solved very fast.
Without loss of generality, V1 is fixed to be the RGB colour space since one usually has RGB colour images. The Lab colour space is used as the secondary colour space V2 since it is often recommended for colour segmentation. Figure 1 shows the results of the SLaT method, clearly, without the help of the synergy of different colour spaces, a disappointing result is obtained (see Figure 1 (b)); fortunately, this disappointment is easy to be cleared up after involving the synergy between different colour spaces (see Figure 1 (c)).
In sum, the new three-stage method, named SLaT for Smoothing, Lifting, and Thresholding, has the ability to segment images corrupted by e.g. noise, blur, or when some pixel information is lost. Experimental results on an RGB image coupled with Lab secondary colour space demonstrate that method SLaT has great performance both in terms of quality and computational time for images corrupted by noise. Now, why not try more tests using method SLaT on your own images at hand with other degradations like information loss and/or blur?
These findings are described in the article entitled A Three-Stage Approach for Segmenting Degraded Color Images: Smoothing, Lifting and Thresholding (SLaT), recently published in the Journal of Scientific Computing. This work was led by Xiaohao Cai (University of Cambridge), Raymond Chan (The Chinese University of Hong Kong), Mila Nikolova (Université Paris-Saclay) & Tieyong Zeng (Hong Kong Baptist University).
Related Posts
 Improving Tools For Quality Improvement: Crossings, Runs, And Crossrun
Improving Tools For Quality Improvement: Crossings, Runs, And Crossrun Coherent Poly Propagation Materials With 3-Dimensional Photonic Control Over Visible Light
Coherent Poly Propagation Materials With 3-Dimensional Photonic Control Over Visible Light Reconstructing Commuter Networks Using Machine Learning And Urban Indicators
Reconstructing Commuter Networks Using Machine Learning And Urban Indicators Surprising Internal Structure Of Whole Wheat-Green Gram Functional Bread
Surprising Internal Structure Of Whole Wheat-Green Gram Functional Bread Tailoring Tomatoes To Match Individual Consumer Needs
Tailoring Tomatoes To Match Individual Consumer Needs Eavesdropping On “Classroom Talk” In Undergraduate STEM Classrooms
Eavesdropping On “Classroom Talk” In Undergraduate STEM Classrooms